
Page path:
- Home
- Infrastructure
- Marine Technology
- MARUM SEAL
- AUV Control
AUV Control
Two logical control units are necessary to operate the AUV - Downside Control (VCC; Vehicle-Control-Computer, implemented in the AUV) and Topside Control (SCC; Surface Control Computer and MPW; Mission Planning Workstation - both installed in a control van), a dedicated control van is not demanding. Nevertheless, at MARUM the AUV topside control is integrated in a 20" van. However, the AUV could be operated from a small 19" control rack console or from a laptop console (virtual SCC) for field tests.
The AUV operation system (OS) is being based on a real-time capable Unix derivative QNX and the software framework ACE. On both logical control units (VCC and SCC) this OS is running on compact PCI industrial PC-stacks. A grafical user interface (GUI) is running on the SCC as user-interface; from here the AUV could be fully controlled and monitored. Both, the GUI and the OS of AUV could be modified by the user. The realisation of an AUV mission will be planned on the MPW, which is beeing based on MS Windows - actually, the real AUV missions will be created in the mission planning software MIMOSA © IFREMER.
The AUV operation system (OS) is being based on a real-time capable Unix derivative QNX and the software framework ACE. On both logical control units (VCC and SCC) this OS is running on compact PCI industrial PC-stacks. A grafical user interface (GUI) is running on the SCC as user-interface; from here the AUV could be fully controlled and monitored. Both, the GUI and the OS of AUV could be modified by the user. The realisation of an AUV mission will be planned on the MPW, which is beeing based on MS Windows - actually, the real AUV missions will be created in the mission planning software MIMOSA © IFREMER.
Downside control

Opened forward AUV payload bay with attached external sensors; Seabird CTD (top) - SerCel MATS UW-modem (below) - RESON transceiver (bottom right).

Aft section of pressure housing with visible connector ports from external sensors into the internal housing.
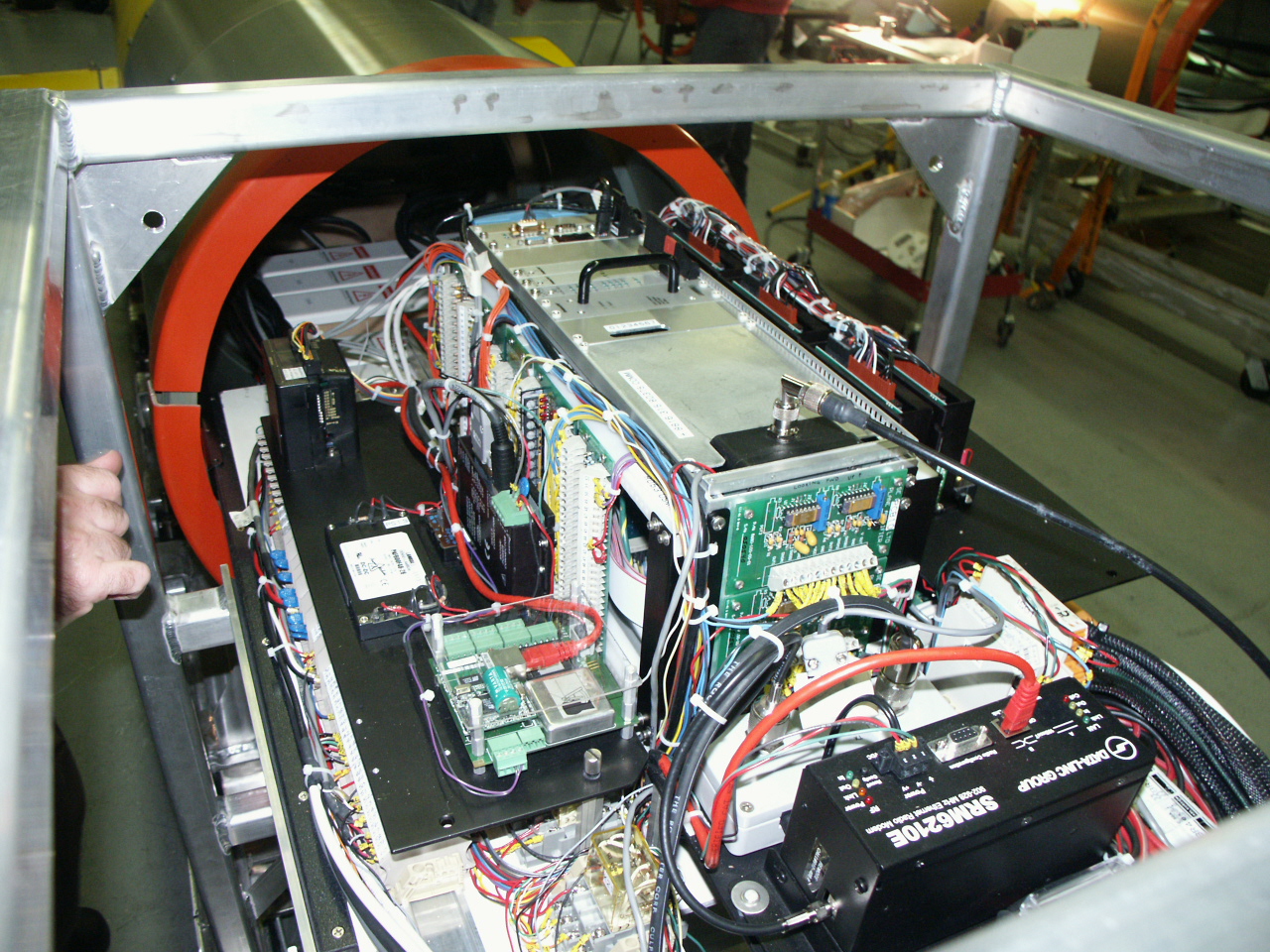
Opened AUV pressure housing; view on industrial cPCI stack of VCC.
Topside control

View on SCC console monitor with running GUI; central interface to control and monitor the actual status of AUV.

View on MPW screens with running MIMOSA software (© IFREMER).

AUV control van; screens: MPW (left), SCC (middle), data server (right).