
Seitenpfad:
- Startseite
- Infrastruktur
- Meerestechnik
- MARUM SEAL
- Mission-Monitoring
Mission-Monitoring
AUV-Tracking
Ein autonomes Unterwasserfahrzeug wie MARUM SEAL kann in seinem Einsatz nicht aktiv wie ROVs positioniert werden, vielmehr arbeitet es eine Wegpunkt-Navigations ab, gemäß eines geladenen Missions-Plans. Unabhängig von dieser fahrzeugeigenen Navigation wird das AUV von einem unabhängigen schiffsseitigen System beobachtet und die aktuelle Position des AUVs kontinuierlich abgefragt. Hierbei kommen 2 Varianten eines Ultra-Short-Base-Line Tracking Systems zum Einsatz (USBL). Bei großen Wassertiefen wird das IXBLUE POSIDONIA eingesetzt (üblicherweise dauerhaft im Forschungsschiff installiert), bei geringeren Wassertiefen wird das IXBLUE GAPS System eingesetzt (mobil). Beide Systeme benötigen Akustik-Antennen an Bord des Trägerschiffes, die mittels eines Inertialsystems und eines GPS Receivers die exakte Lage der Trägerschiffes erfassen und alle 5 Sekunden einen Abfragepuls zum tauchenden AUV senden. Ein dort installierter Transponder anwortet auf diese Abfrage. Die Akustik-Antenne an Bord kann aus den Laufzeitunterschieden vom Senden/Empfangen die genaue Position des AUVs ermitteln (typisch +/- 5 m). Diese Tracking-Anwendung mit USBL ist etwas ungenauer als bei einem Long-Base-Line System (LBL), jedoch müssen keine separaten Transponder am Meeresboden gesetzt werden und die mobilen Einheiten sind ortsungebunden.
GAPS Antenne

Installations-Adapter zur Montage einer GAPS-Antenne (kurzer Adapter) und zur Aufnahme für den Transducer des Unterwassermodems (langer Adapter); beides montiert an einer Lotschacht-Platte der FS POSEIDON.

Montage der fertig bestückten Lotschacht-Platte (GAPS links, Transducer rechts) an Bord der FS POSEIDON.
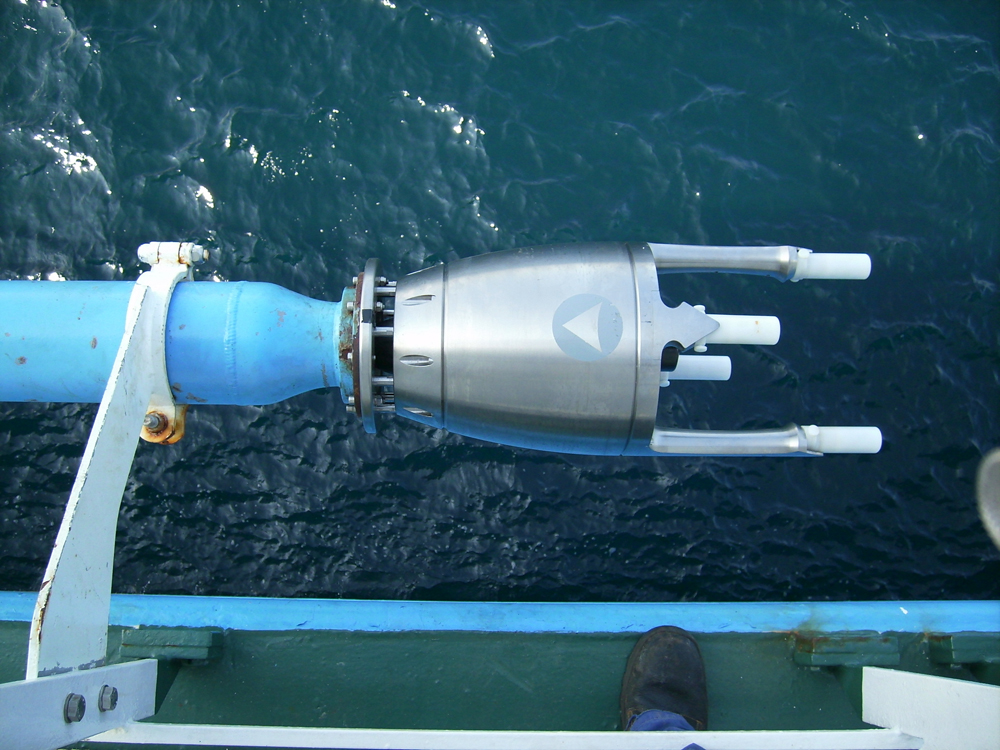
GAPS-Antenne montiert am Ausleger von RV PELAGIA. Für den Einsatz wird der Ausleger in das Wasser abgesenkt.
Software-Darstellung

GAPS Tracking des abtauchenden AUVs. Der Plott zeigt die Tiefenlage des AUVs, aufgetragen gegen die Zeit.

POSIDONIA Track des abtauchenden AUVs in starker Strömung. Der rote Kreis markiert die Soll-Abtauchposition des AUVs, die grüne Punktespur markiert das nach links verdriftene AUV beim Abtauchen in größere Wassertiefen.
POSIDONIA Mission-Track einer 55 km AUV Mission (die dunkelgrüne Punktespur entspricht der Antennen-Anfrage). Die aktuelle AUV-Position zeigt der kleine Kasten links am Bildrand.