
- Startseite
- Infrastruktur
- Meerestechnik
- MARUM SEAL
- AUV Steuerung
AUV Steuerung
Das AUV Kontrollsystem basiert auf einem echtzeitfähigem Unix-Derivat - QNX und dem Software-Framework ACE. Dieses ist sowohl auf dem VCC als auch auf dem SCC als ein Compact-PCI System im Industriedesign verbaut. Auf dem SCC läuft als Nutzerschnittstelle das Grafikinterface (GUI), hierüber wird das AUV kontrolliert und gesteuert. Sowohl das Kontrolsystem des AUVs, als auch das GUI sind durch den Nutzer veränderbar. Die eigentliche Missionsplanung findet auf dem MPW statt, der auf WINDOWS aufsetzt und die Planungssoftware MIMOSA (©IFREMER) benutzt.
Downside-Control

Geöffnetes vorderes AUV Segment; sichtbar ist der vordere Nutzlastbereich sowie externe Sensoren (SeaBird CTD - oben, Sercel MATS Elektronik - darunter, die RESON Schwinger - u. rechts).

Hinteres Druckhüllensegment mit Kabeldurchführungen der externen Sensoren in die Druckhülle zum Steuerungsrechner.
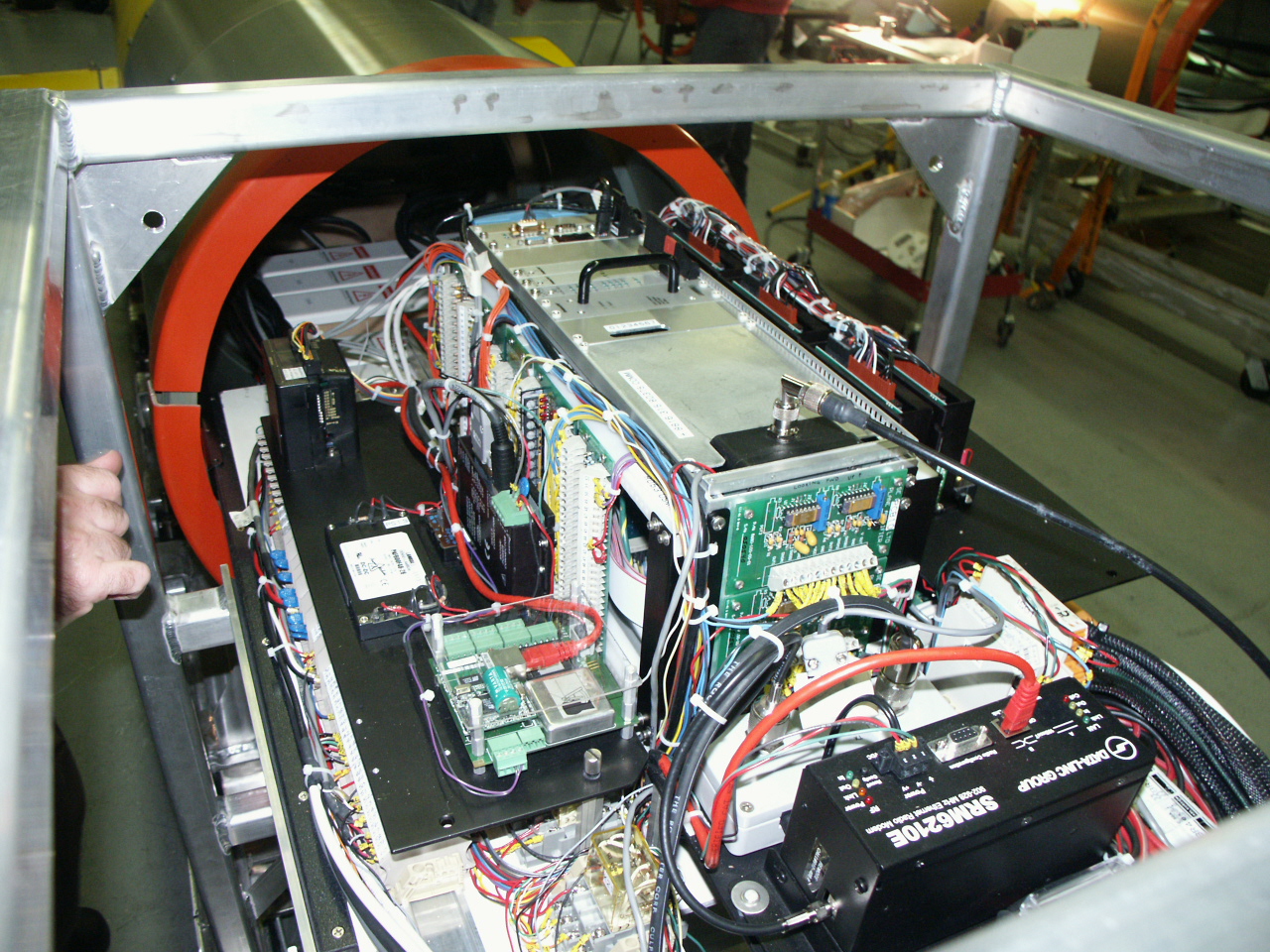
Blick in die geöffnete Druckhülle; sichtbar ist der VCC, basierend auf einem Industrie-cPCI Rechnerstack.
Topside-Control

Ansicht des SCC mit AUV Nutzer-Interface (GUI); zentrales Steuerungselement für sämtliche AUV-Funktionen sowie die Überwachung des gesamten AUV-Zustands.

Ansicht des MPW-Bildschirms mit der MIMOSA Planungssoftware (© IFREMER); sichtbar ist eine aktive Mission des AUVs.

Blick in den AUV Control-Container; Bildschirm links - MPW, Bildschirm mitte - SCC, Bildschirme rechts - Datenserver.